

How to set the coordinate system of the manipulator?


2 Answer

You have a number of options but these should be informed by the design requirements, design intent and the concept of operation.
The following options should be considered for locating the master co-ordinate system for an articulated arm:
Principal symmetry feature of a fixed base;
Principal corner/envelope extremity with reference to a critical interface.
Origin coincident with the axis of rotation of the first articulating member.
I would, however suggest the following as candidate locations of the co-ordinate system:
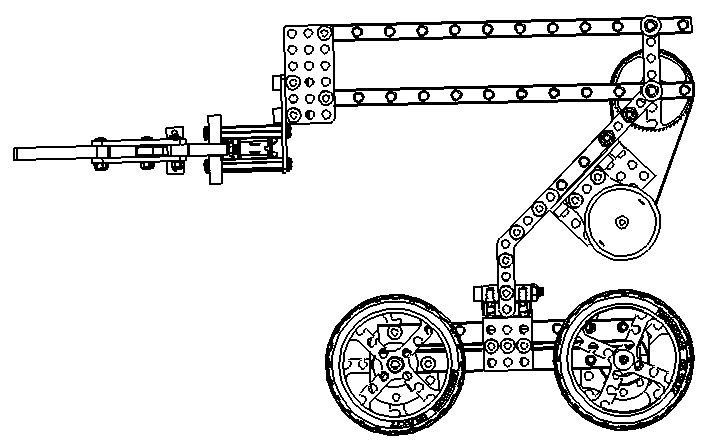
1. Equidistant form each wheel corner in a plane coincident with the centerlines of the wheel axles. Z-Axis parallel to axis of first articulated member;
2. coincident with the centerlines of the wheel axles. Z-Axis colinear with axis of first articulated member;
3. Origin on front or rear face of the chassis.
4. Origin on some virtual feature corresponding to the stowed position of the last articulated member (grabber)
I hope I could have been some help.

thinks
